
Produkter
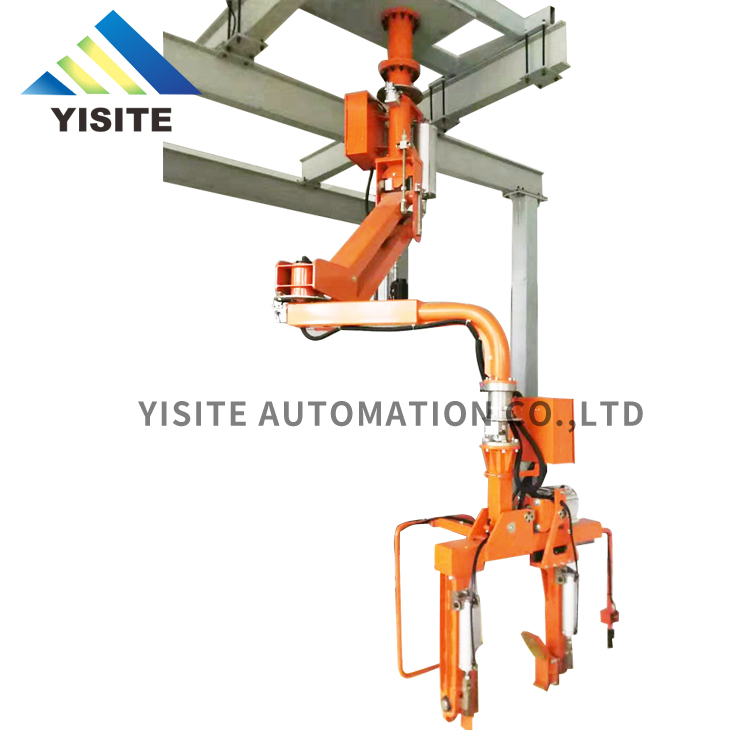


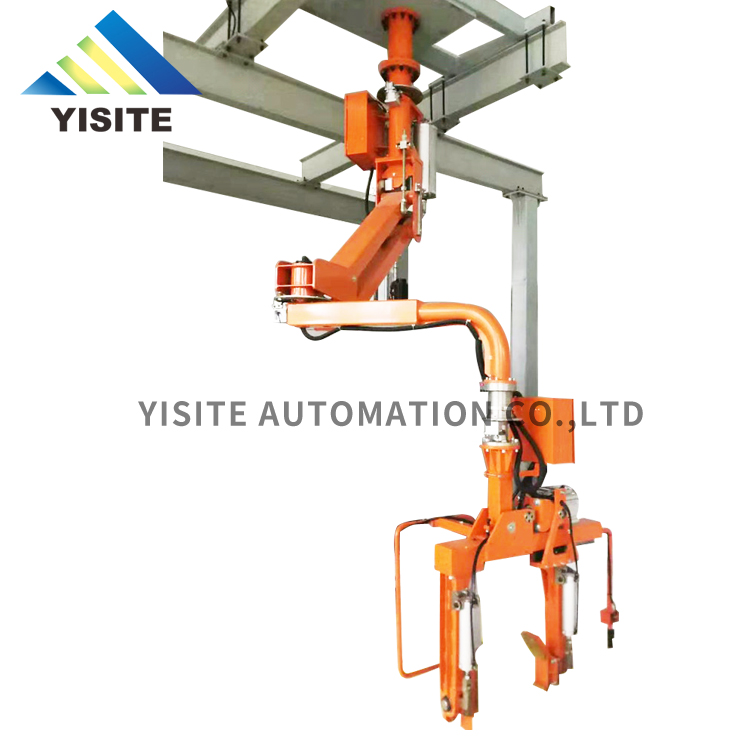
suspension Jib Cranes Manipulator
Kort beskrivelse:
Suspensionsbooster-manipulatoren består af installationsbasen, værts- og stålarmstangen, armaturet. Hovedarmen kan drejes 360 grader, den anden armstang kan drejes 270 grader for at opnå arbejdsområdet for dækning, og rotationen kan tilføje bremsemekanisme. Den er velegnet til højfrekvent håndtering, positionering, komponentsamling og andre lejligheder.



om os

Vi er en professionel producent af tilpasset automationsudstyr. Vores produkter omfatter depalletizer, pick and place-pakkemaskine, palletizer, robotintegrationsapplikation, lastnings- og losningsmanipulatorer, kartonformning, kartonforsegling, palledispenser, indpakningsmaskine og andre automatiseringsløsninger til back-end emballageproduktionslinje.
Vores fabriksareal er omkring 3.500 kvadratmeter. Det tekniske kerneteam har i gennemsnit 5-10 års erfaring inden for mekanisk automation, herunder 2 mekaniske designingeniører. 1 programmeringsingeniør, 8 montagearbejdere, 4 eftersalgsfejlfindingsperson og andre 10 arbejdere
Vores princip er "kunden først, kvalitet først, omdømme først", vi hjælper altid vores kunder med "øge produktionskapaciteten, reducere omkostningerne og forbedre kvaliteten" vi stræber efter at blive en topleverandør i maskinautomationsindustrien.
Produktegenskaber
Ved at detektere sugekoppen eller enden af manipulatoren og afbalancere gastrykket i cylinderen, kan den automatisk identificere belastningen på den mekaniske arm og automatisk justere lufttrykket i cylinderen gennem det pneumatiske logiske kontrolkredsløb for at opnå formålet med automatisk balance.Når den arbejder, er tunge genstande som at blive ophængt i luften, hvilket kan undgå kollision af produktdocking. Inden for den mekaniske arms arbejdsområde kan operatøren nemt flytte den tilbage, til venstre og ned til evt. position, og personen selv kan nemt betjene.Samtidig har det pneumatiske kredsløb også kædebeskyttelsesfunktioner såsom at forhindre utilsigtet tab af objekter og beskyttelse mod tryktab

Arbejdsprincippet og tilstanden for affjedringskraftmanipulatoren:
Ved at detektere sugekoppen eller enden af manipulatoren og afbalancere gastrykket i cylinderen, kan den automatisk identificere belastningen på den mekaniske arm og automatisk justere lufttrykket i cylinderen gennem det pneumatiske logiske kontrolkredsløb for at opnå formålet med automatisk balance. Når du arbejder, er tunge genstande som at blive ophængt i luften, hvilket kan undgå kollision af produktdocking. Inden for den mekaniske arms arbejdsområde kan operatøren nemt flytte den tilbage, til venstre og ned til enhver position , og personen selv kan nemt betjene.Samtidig har det pneumatiske kredsløb også kædebeskyttelsesfunktioner såsom at forhindre utilsigtet tab af objekter og beskyttelse mod tryktab
Funktioner
Max nyttelast. 900 kg
Max aktionsradius: 4500 mm
Lodret rejse: 0,5m/min
Kontrolsystem: 2200 mm
Kontrolsystem: luft fuldt pneumatisk
Levere: Trykluft (40 µm), indeholder ikke fedt
Arbejdspres: 0,7 ÷ 0,8 Mpa
Arbejdstemperatur: +0° til +45°C
Støj:luftforbrug: 100 Nl ÷ 400 N pr. cyklus
Rotation: Søjleaksel og fiksturaksel 360° kontinuerlig rotation, midteraksel 300° kontinuerlig rotation







